To introduce the CAN bus technology to realize the networking of the motion control system. The hardware and software design scheme of the main node of CAN bus based on LPC2294 is proposed. The hardware uses the ARM7 core-based microcontroller LPC2294, uses the CTM1050T as the CAN transceiver, designs the hardware circuit with CAN bus and Ethernet interface, and expands SRAM, NORFLASH and NAND Flash. The software uses μCLinux as the operating system, and develops the driver of the CAN controller to realize various functions of the CAN bus. The effectiveness of this scheme was verified by making prototypes and conducting experiments.
CAN (Controller Area Network) is one of the most widely used fieldbuses in the world. It has become the standard bus for computer control systems and embedded industrial control LANs. Networked MoTIon Control Syst EMS is a motion control system built between the controller and the motor driver that can transmit motion control commands and receive motion status in real time and synchronously, and control the closed loop to connect through the network. In order to introduce the CAN bus technology to realize the network of the motion control system, the author proposes a hardware and software design scheme of the main control node of the CAN bus based on LPC2294, which has the characteristics of high performance, high reliability and good expandability, and is very suitable for sports. Control System.
1 overall design
The master node adopts the LPC2294 microcontroller of ARM7 core, and uses RTL8019AS as the Ethernet controller. The software adopts μCLi nux with strong network function, stable performance and good portability as the operating system. The motion control system based on CAN bus is mainly composed of one master node (master controller node), several slave nodes (motor control nodes) and one computer. The master node and the slave nodes communicate through the CAN bus. The node communicates with the computer via Ethernet, as shown in Figure 1.
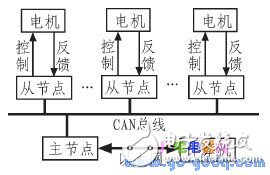
Figure 1 Motion system control structure
The main functions of the master node include: 1) sending motor control information to the slave nodes via the CAN bus, and receiving feedback information from each slave node: 2) communicating with the computer monitoring terminal via Ethernet to achieve remote monitoring.
1.1 Overall hardware design
The overall hardware structure of the master node is shown in Figure 2.
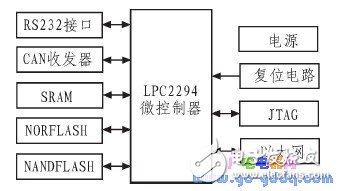
Figure 2 hardware structure
The LPC2294 used by the master node is based on the ARM7TDMI core 32-bit processor, with 256kB high-speed FLASH, 16kB static RAM, internal integrated 4-channel CAN controller, support for SRAM, FALSH expansion. Since the LPC2294 integrates CAN internally, the external CAN transceiver only needs to be connected to it. The CAN transceiver uses Zhou Ligong's CTMl050T.CTM1050T, a high-speed CAN transceiver with isolation. The main function is to convert the logic level of the CAN controller to the differential level of the CAN bus, and has an isolation function (DC2500 V). ESD protection function and TVS tube anti-bus overvoltage function. The LPC2294 has an external memory controller (EMC) that allows you to expand more FLASH and SRAM and peripherals such as Ethernet and USB. The master node uses RTL8019AS as the Ethernet controller, and uses MT45W4MW16, SST39VF1601, and K9F2G08UOA to expand SRAM, NORFLASH, and NANDFLASH respectively.
1.2 Software Structure
The main node software structure is shown in Figure 3. U-Boot acts as the BootLoader (boot bootloader) and is responsible for initializing the target board hardware and booting the operating system. Here μCLinux is used as the embedded operating system. μCLinux (mICrocontrol linux) is a "Linux system in the field of microcontrollers" designed primarily for embedded systems where the target processor does not have a storage management unit (MMU). It retains most of the advantages of Linux: stability, good portability, excellent network capabilities, full support for various file systems, and standard rich APIs. μCLinux includes a large number of device drivers and provides good drivers. Development Framework. Driver development or configuration mainly includes CAN, Ethernet and NANDFLASH3. The upper application develops various applications by using CAN interface functions, Socket interfaces, and library functions. The boot process of the whole system is: U-Boot loads the μCLinux kernel from NORFLASH into SRAM, then starts μCLinux. After μCLinux initializes the hardware and establishes the running environment, it automatically runs the default application.
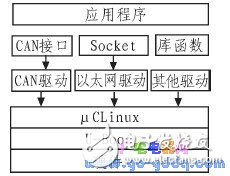
Figure 3 software structure
2 hardware design2.1 LPC2294 minimum system
The LPC2294 is available in an LQFP144 package. The minimum system requires analog and digital 3.3 V supplies and a core power supply of 1.8 V. To facilitate the serial baud rate setting, an external 11.0 592 MHz crystal is connected. P2.26 (BOOT0) is pulled up by 10 kΩ resistor, P2.27 (BOOT1) is connected to a jumper block, and P2.27 can be connected to high level or low level by jumper to select from internal FLASH or external NORFLASH. start up. The manual reset monitoring circuit is composed of CAT1025, which improves the reliability of the system. When the SW button is pressed, the 2-pin output of the CAT1025 continues to be low for more than 150 ms, and the LPC2294 is reset. The 2 pin of the CAT1025 is pulled up by a 10 kΩ resistor to prevent an erroneous pin output state. The reset circuit is shown in Figure 4.
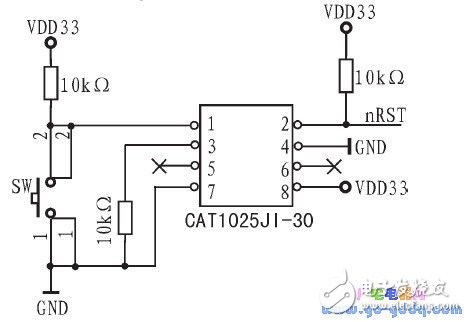
Figure 4 reset circuit diagram
ZGAR Aurora 1200 Puffs
ZGAR electronic cigarette uses high-tech R&D, food grade disposable pod device and high-quality raw material. All package designs are Original IP. Our designer team is from Hong Kong. We have very high requirements for product quality, flavors taste and packaging design. The E-liquid is imported, materials are food grade, and assembly plant is medical-grade dust-free workshops.
Our products include disposable e-cigarettes, rechargeable e-cigarettes, rechargreable disposable vape pen, and various of flavors of cigarette cartridges. From 600puffs to 5000puffs, ZGAR bar Disposable offer high-tech R&D, E-cigarette improves battery capacity, We offer various of flavors and support customization. And printing designs can be customized. We have our own professional team and competitive quotations for any OEM or ODM works.
We supply OEM rechargeable disposable vape pen,OEM disposable electronic cigarette,ODM disposable vape pen,ODM disposable electronic cigarette,OEM/ODM vape pen e-cigarette,OEM/ODM atomizer device.

Aurora 1200 Puffs,Pod System Vape,Pos Systems Touch Screen,Empty Disposable Vape Pod System,1200Puffs Pod Vape System
ZGAR INTERNATIONAL(HK)CO., LIMITED , https://www.szvape-pen.com