Use NI CompactRIO as the "cylulus" of the robot. NI CompactRIO is an industrial-grade embedded controller from National Instruments of the United States. It integrates an Ethernet interface and an RS232 serial interface. It has the advantages of small size, high reliability, high performance, and low power consumption.
Control algorithms for various devices such as robotic arm motion control, head motion control, navigation algorithms, Ethernet-based light radar data acquisition, and brain communication programs are deployed in RT; digital signals are collected, such as limit switches and The emergency stop logic also has encoder data acquisition and processing, and ground motion servo control algorithms are deployed in the FPGA.
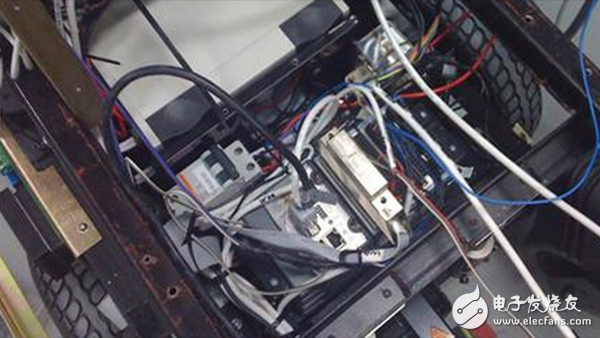
The industrial embedded touch tablet IPC is chosen as the "brain" of the robot. Deploy WinCE, with human-machine interface function and touch screen interaction function, deploy control face recognition module and voice recognition algorithm, smart home monitoring management algorithm.
Wrap each device object with FSM:
The Finite-state machine (FSM) is called a finite state machine widely used in digital circuits and computer programs. We used two state machines to package the device. String Based Queued State Machine is based on a string queue state machine and a normal enumeration-based state machine. The state machine is used as a mechanism to handle state transitions for a single device, or to use a behavioral model of the state machine for event handling of a single device.
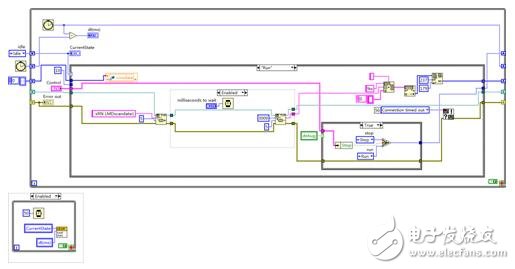
Figure 2 LIDAR state machine
For example, the state machine diagram of the light radar has four states, Idle, Start, Running, and Stop. In the Running state, the program continuously sends instructions to the Light Radar to read the data, and then a Shared Variable to transmit the data. Use a LIRAR.vi to encapsulate this state machine.
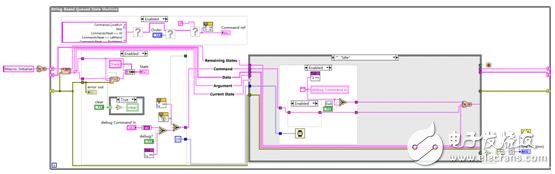
Figure 3 Remote Control ReacTIon state machine
Figure 3 is a remote control instruction parsing state machine that uses the String Based Queued State Machine. The advantage of this is that queues can be used to organize actions, with a variety of different combinations and complexity.
The state machine of each device is packaged with a separate vi and tested separately, which is also beneficial for engineering.
Multi-state machine collaboration:
A single state machine can only perform part of the function. We need to integrate all the device state machines and assemble them into a complete robot according to a certain communication mechanism.
Since all device state machines are encapsulated by a VI, they can be called by dragging them into a main vi. as the picture shows:
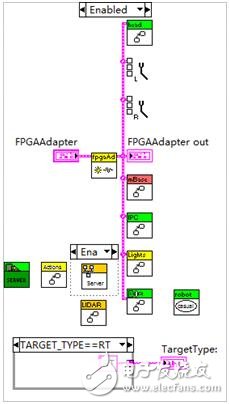
Figure 4 state machine integration
The state machine is connected to the external command input and its own state output through the Shared Variable. Again, these Shared Variables are packaged with a VI for management.
In this way, a state machine can be considered a subsystem. Since it is a system, there are naturally system inputs and outputs. The external system can operate or interact with these subsystems via the methods of get, set, etc. As shown, the chassis state machine uses the getCommand.vi method to get external commands.
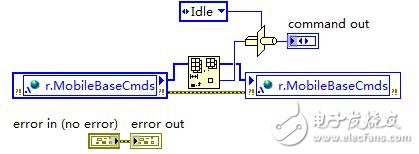
Figure 5 getCommand.vi
Use the setCommand.vi method to let the external system transfer commands to the site state machine.
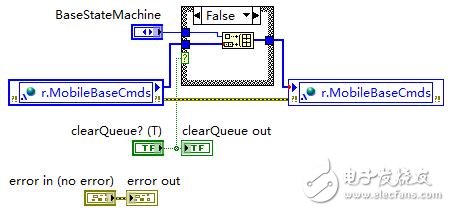
Figure 6 MobileBase.lvlib:setCommand.vi
The chassis uses sendState.vi to send chassis state machine status information. as the picture shows:
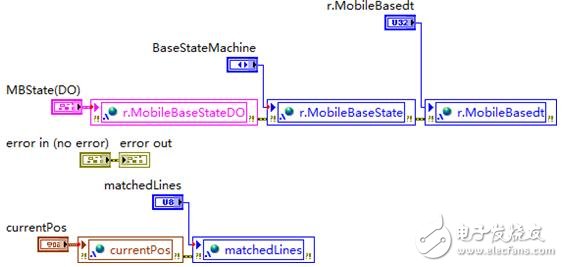
Figure 7 MobileBase.lvlib.sendState.vi
Use the getState.vi method to get the site state machine information.
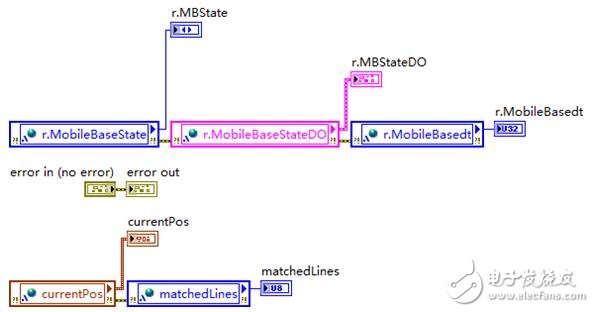
Figure 8 getState.vi
Navigation algorithm:
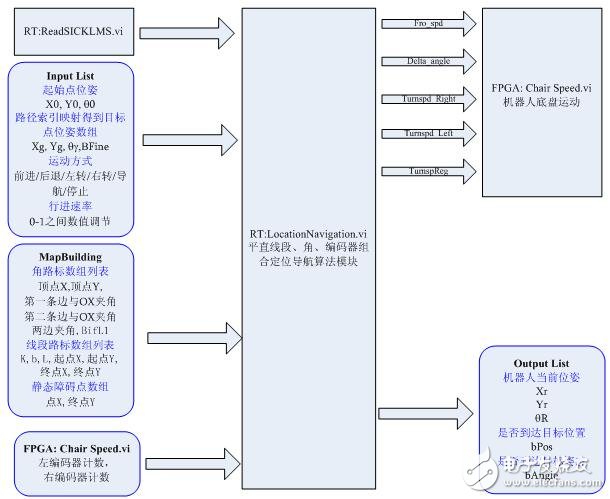
Figure 9 home monitoring robot positioning navigation software control block diagram
The ultra-thin precision cutting of the Anti-Peep Screen Protector means that you can enjoy a perfect touch screen experience without allowing anything on the screen to be peeped. Whether you place your phone horizontally or vertically, Privacy Screen Protector can protect your personal Information and sensitive information are protected from harm by strangers. People around you cannot see the contents of your phone, so your details are safe.
The use of soft TPU material can really cover the entire screen.
With self-healing function, it can automatically repair bubbles and scratches within 24 hours.
The 0.14mm Ultra-Thin Protective Film can maintain the sensitivity of the touch screen to accurately respond to your touch.
The oleophobic and waterproof coating prevents fingerprints, oil stains and other substances from adhering to it and keeps the screen clean.
If you want to know more about Privacy Screen Protector products, please click Product Details to view the parameters, models, pictures, prices and other information about Privacy Screen Protector products.
Whether you are a group or an individual, we will try our best to provide you with accurate and comprehensive information about Privacy Screen Protector!
Anti-Spy Hydrogel Screen Protector, Privacy Protection Film, Protection Film, Privacy Film, Privacy Screen Protective Film, Soft Film
Shenzhen Jianjiantong Technology Co., Ltd. , https://www.jjthydrogelprotector.com