The two major cores of sweeping robots are: road-finding navigation systems and sweeping systems. Obviously, the former is more complex. The navigation process mainly refers to the sensor's perception of the external environment information and indicates the robot's collision-free process from the initial position to the target position. Specific can be expressed by the following questions: 1. Where do I go? 2. When do I start? 3. What is the best path? 4. Where have I been to? 5. Where am I now? 6. When will I go back? The main technologies involved in solving these six problems include task reservation, multi-sensor information fusion, device location, and path planning.
The basic principle of path planning
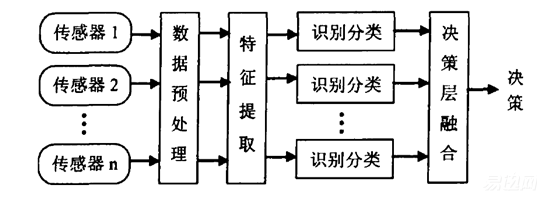
At present, the navigation methods of various sweeping robots have their own characteristics. The principle is nothing more than the collection of raw data and multi-data fusion through various sensors such as laser, sonar, and vision in the feature layer, and the path is planned through the decision-making layer.
Today, the sensors used to navigate the sweeping robots in the interior adopt a laser rangefinder. The feature is that it can effectively reduce the amount of calculations and has a rapid response. The disadvantage is that only 2D maps can be built . Some brands of sweeping robots use cameras and lasers to build. 3D area map grid. Don't talk to me about the kind of circling that really does not belong to the navigation category.
The cleaning robot acquires raw data and performs feature matching through various sensors, screens comparison data, obtains landmark features and environmental information, calculates information credibility, and judges through decision-making layer fusion, stores location relationships in memory, and plans routes to achieve automatic return.

In the era of rapid development of modern science and technology, the arrival of sweeping robots as a cleaning device that directly relates to the environment and health of residential buildings is particularly intense. However, sweeping robots on the market today are mostly “manipulators who need to intervene manually and rely on random work.†"Sweeping machine, repeated cleaning and omission, the overall efficiency is low, far from meeting consumer household cleaning needs. Based on this situation, inxni navigation sweeping robots undertook 11 years of technology R&D and production advantages of Shenzhen Yinxing Intelligent Technology Co., Ltd. , and a revolution was born.
After more than ten years of hard work, Yinxing Intelligent Technology owns 4 international patents, 131 domestic patents and 10 software copyrights. The industry holds the second largest amount of patents in the world, and has been recognized as a national high-tech enterprise and has undertaken the National Torch Plan. The project “Intelligent Service Robots†has long provided technical development and manufacturing services for a number of internationally renowned brands. Its product quality is deeply trusted by customers, enjoys a high reputation at home and abroad, and is a leader in domestic home service robotics industry.

The above two paragraphs are taken from the official website. It seems that this is a more "hard" resume, but the product is hard to pull out.
three. Look at the product
There are three types of navigation sweeping robots sold in the market: the orange X353 and x533, and the orange X332 . The main differences between the three are the battery capacity and the operation method. The product I experience is a relatively high- profile X533. .

Product packaging is divided into two parts, the main part (large) and the attachment part (small). The packaging style did not follow the popular “sexy wind†style. Instead, it used a very elaborate gift box. The pattern was simple and direct, and the colors contrasted strongly. Brief introduction to product performance: Laser navigation, path planning, App visual interaction.

The accessory section includes a spare sweep brush, eight pieces of furniture spacers, a maintenance screwdriver, a cleaning brush and a spare filter. The furniture spacer is used to facilitate the floor sweeper to clean the floor of the furniture. If necessary, the furniture should be raised. There are eight pieces in total, each with a thickness of about 4mm .

Sweeper main body and charging rake. The styling inside is a little bit different from most sweeping robots in the market. The color is more brilliant, the orange color is the main tone, and the black and silver grey are elegant, fashionable and very eye-catching. In short, it is not a serious sweeping machine at a glance.
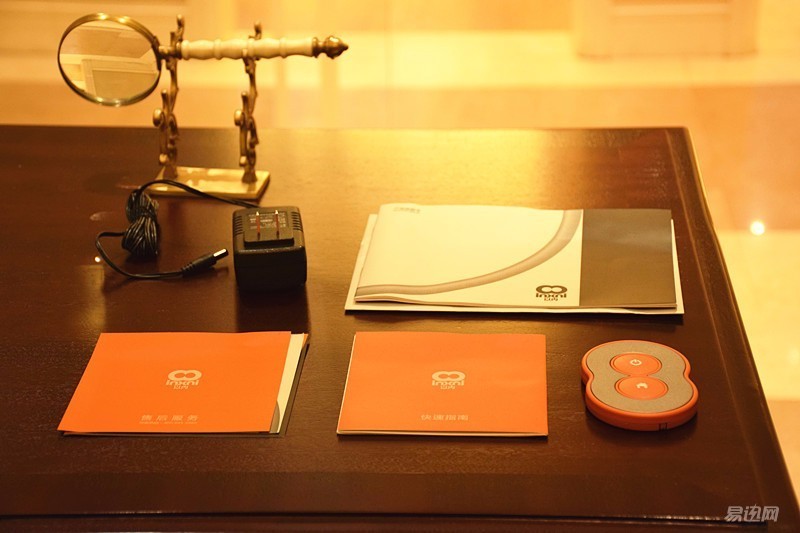
In addition to the main body of the sweeper body and charging, there are power adapters, remote control and a pile of scrap paper files, including product manuals, quick guides, after-sale protection cards, product warranty cards, and certificate of conformity.

The power adapter output is 18V/1A .

The shape of the remote control is very Q , still orange and silver-gray, use a CR2025 button battery. The middle two keys are the "clean" and "back" keys respectively.

The product size is ∅ 340 × 98.5mm and there is no special advantage in thickness. The large black area on the front side is the laser scanning emission area, which is also the "eye" inside , and the scanning distance is 7m .

The front is equipped with a collision buffer structure, which can play a certain role in protecting the equipment.

Inside the "back pack" (dust box) is set on the back side , the capacity is 0.35L , you can easily pull it out by pressing the middle groove. The right side of the "backpack" is a power switch. If it is not used for a long time, it is recommended that it be turned off.

Dust box structure.

The top two key symmetrical settings, on both sides of the switch key and below the other four keys are hidden, respectively clock, timing sweep, return charge, the current time setting, the top side of the switch is a hidden LED clock. The text icon in the photo was printed on the sticker, so it was not very regular.
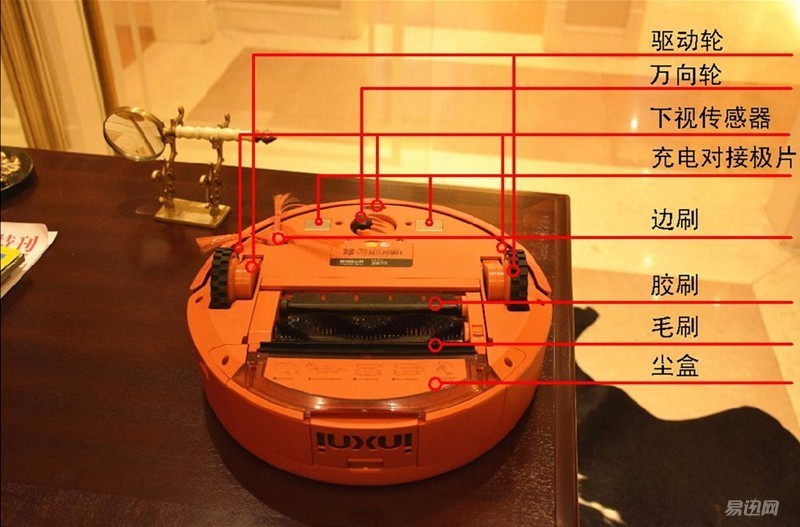
As the main work area, the bottom of the facility is relatively rich, a universal wheel, a pair of driving wheels, three down-view sensors, a pair of charging docking pole pieces, a side brush, a glue brush, a brush, a dust box .
At the bottom of the dust box is a pattern description of the opening style, which is simple and direct, which is very practical for a friend who does not like to flip the instructions.
The drive wheel has a power assist function that makes it easier to cross over uneven ground.

Draw out the dust box and open the buckle to remove the glue brush and brush for easy cleaning.
Charging port, after the return to the bottom of the docking pole piece and the charging base on the two metal posts contact, to achieve charging function.
The introduction of the appearance is a bit tedious, but the use of effects is the most important. Charge the device to meet the exam.

The battery capacity of the internal sweeper is 2600mAh . The official data provides 1.5 hours of charging time . It can achieve 2-2.5 hours of continuous cleaning. The powerful suction of 600Pa has a continuous cleaning area of ​​about 150 m2. Point sweep function.
Note that when charging, be sure to close the excess wire on the power adapter (shown in the red circle in the figure above), because when you work inside, it will be wrapped around the messy cables on the ground and it is difficult to get rid of it.
The battery is full and the exam begins immediately.

The functions of starting cleaning, returning to charging, and timing cleaning can be realized by pressing the keys on the inside body.
The X533 's remote control methods include remote control and visualized mobile phone APP control. Remote control mode is very simple, after all, only the "clean" and "back" two keys, let's experience the APP control in detail .

The mobile phone scans the QR code, downloads the APP , and connects the sweeper. The process within the mobile phone connection is a WiFi network established by the mobile phone through wireless access , which realizes remote control, which means that when the mobile phone is connected with the inside, the network will be interrupted.

APP 's style is very cute, the main interface of a dynamic within the elf, like a Transformer will be like a sweeping machine for a while will be adult-shaped.
The main functions of the APP include task reservations, fixed-point or global sweeps, viewing of drawn 2D maps and areas that have been swept, viewing sweeper status records, returning charge, viewing instructions, and the like.

Sweeper status records, one of which was marked with a red cross because the connection was disconnected from the phone.
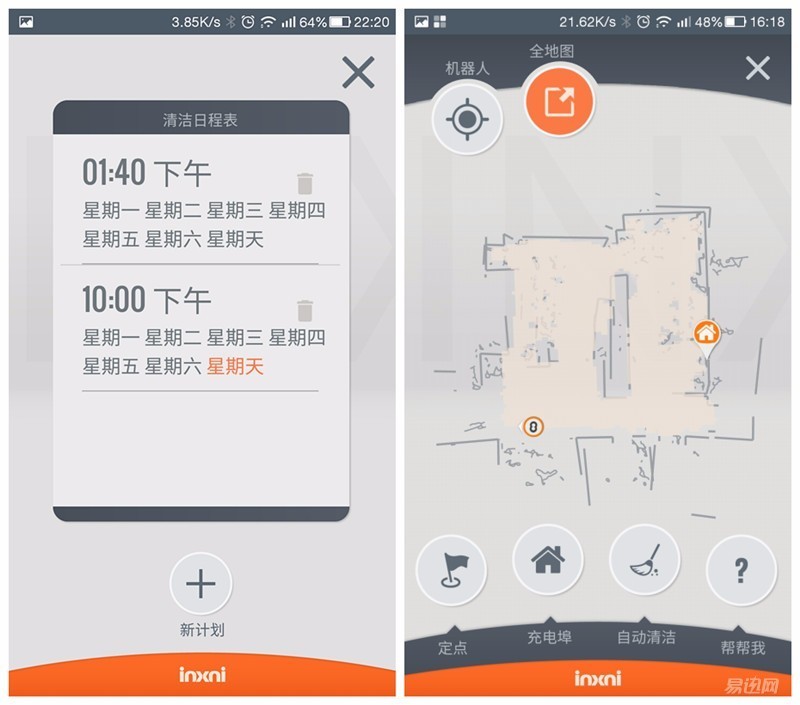
Task appointments and map viewing. Task appointments are somewhat similar to the phone's alarm settings and can add multiple daily sweeping plans. In the map, real-time positioning can be used to directly display the running status of the sweeper. The painted area is the cleaned area. The icon of the small house is the charging position.

App overall evaluation: The overall design is very good, Q version of the model is very affinity, powerful and practical, informative, but the stability is a bit bad. When connected, once the phone touches the screen, the connection is interrupted, and when it is connected again, it is often very slow. Connection failure is also a common phenomenon. Individuals still prefer to use a simple remote control.

With a slope of 20 °, the shell floor of the enclosure is approximately 1.5 cm above the floor , which limits the height difference to 1.5 cm .



Laser scanning, accurate detection, accurate barriers.

Accurate fit, no dead cleaning.

The bow-shaped route is straight-line cleaning, fast and efficient.

When the old driver is also paralyzed, he is stuck under the desk and automatically stops running after an operational error.

Hit the bar and continue to squat.
The operation lasted for approximately one hour. The cleaning area included the living room, study and dining room, with an area of ​​approximately 70 m2.
Operation summary: As the main selling point of the navigational sweeping robot within, the advantage of the powerful path planning function is very obvious. In operation, you can rapidly build 2D maps with quick scans . The route planning is reasonable, the response is sensitive, and the sweeping is efficient and orderly. However , the limitations of 2D maps are also displayed. Although three sensors are provided inside the bottom, it is possible to effectively prevent the steps from being dropped (verified), but in the horizontal direction, the obstacles slightly higher or lower than the sensor are not recognized within the range, so the above figure appears in use. Hit the bar or push the slippers to run. In addition, the ability to grasp the width of the fuselage within a special environment needs to be improved. Occasionally, in the narrow space, the collision between the two sides of the fuselage and the table leg occurs.
After watching the operation, we are looking at the capacity of the next cleaning. After all, if you drive a car driver, if you can not pull the goods, then it is also failing.
The author prepared a rich examination for this candidate. Please read the blackboard:

The wastes we tested include flour, glutinous rice, red beans, mung beans, rice, millet, leaves, confetti, sawdust, used to imitate dust such as dust, gravel, and leaves, and the other hand still holds several paper clips in the corners of the house. Also a little broken hair.

The process of making rubbish will be 100 times easier than cleaning. Will the arrival of the rubbish change the pattern?


Looking at the ground like a paint brush is like a strip of clean, really cool.

After cleaning the ground. As the cleaning process, some beans are very easy to roll, so the remaining most, and the remaining leaves, traces of sawdust and other rice grains, most of the garbage are cleaned very clean, including the two paper clips I left behind .
The area to be cleaned is about 30 m2, which takes about 40 minutes.
The instructions stated that before cleaning, please clean the cables that are wrapped around the ground. It can be seen that the ability to get rid of areas inside the cable is not strong, and the author also verified it.

The effect is shown in the figure, the cable was rolled into a glue brush. It seems that it is very necessary to follow the instructions. Before cleaning up, you must clean up the messy cables, including the extended long shoelaces (also verified).
Still make an evaluation. This item does not have many slots, and has good cleaning capability. For some areas that are difficult to clean or require high cleanliness, you can use the fixed-point cleaning function. This item basically meets the requirements of the author, but there is room for improvement. .
I came to the author from within the author to the author to write these lengthy words, just a week, time wasted, not long probation period in the author as much as possible on this device for a comprehensive and detailed experience, I believe friends who read the above content Already have a basic understanding of this sweeping robot, including the product's overall performance, advantages and disadvantages. However, since it is called an experiential report, it is necessary to have a conclusion.

The smart navigation, automatic planning path, and intelligent collision avoidance functions of intelligent navigation sweeping robots do a very good job, basically avoiding inefficient rampages, repeated sweeps, efficient and orderly operations, and other convenient controls, setting up sweeping plans, Viewing the room map is a powerful and practical tool for sweeping information and spot cleaning. It can be said that sweeping robots with traditional random sweeping can be quite different.
Before the trial, the author's expectation was very high. He wished that he could correct all the shortcomings of the traditional sweepers. However, the reality was not ideal, and the inner race was not perfect. The collisions still occurred from time to time, especially for low obstacles. The evading ability of objects (sockets, slippers, etc.) is very limited. Although the manufacturer has a crash cushion on the structure, it still feels a distress when the collision occurs. In addition, the stability of the APP also needs to be strengthened. Although the APP visualization operation is very user-friendly, the frequent disconnection makes the author very annoyed and hopes to improve it.